HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-C50 COLLABORATIVE ELECTRIC GRIPPER




Gulu Lalikulu
Dzanja la loboti la mafakitale / Dzanja la loboti logwirizana / Chogwirira chamagetsi / Woyendetsa wanzeru / Mayankho odziyimira pawokha
Kugwiritsa ntchito
Ma robot gripper a SCIC Z-EFG ndi ang'onoang'ono okhala ndi servo system yomangidwa mkati, zomwe zimapangitsa kuti zikhale zotheka kuwongolera bwino liwiro, malo, ndi mphamvu yogwirira. Dongosolo la SCIC lothandizira pa ntchito zokha lidzakupatsani mwayi watsopano wogwirira ntchito zokha zomwe simunaganizepo kuti zingatheke.

Mbali

· Kuzindikira dontho la gripper, ntchito yotulutsa malo
· Mphamvu, malo ndi liwiro zimatha kulamulidwa bwino kudzera mu Modbus
·Moyo wautali: makumi ambirimbiri a mizunguliro, yoposa zikhadabo za mpweya
· Chowongolera chomangidwa mkati: malo ochepa, kuphatikiza kosavuta
·Njira yowongolera: 485 (Modbus RTU), I/O
Stroke 50mm, Clamping Force 140N, Yogwirizana ndi Robot Arm ya 6-axis.
Kuthamanga Kwambiri
Nthawi yochepa kwambiri yoti munthu agwire ndi 0.5s
Kulondola Kwambiri
Kubwerezabwereza ndi ± 0.03mm
Malipiro Aakulu
Kulemera kolimbikitsa ≤2kg
Pulagi ndi Kusewera
Chogwirira chamagetsi makamaka cha mkono wa loboti wa 6-axis
Kusinthika kwa Mchira
Mchira wake umasintha, woyenera zopempha zosiyanasiyana
Mphamvu Yofewa Yopopera
Imatha kutsekereza zinthu zosalimba komanso zopindika

● Kulimbikitsa kusintha kwa zinthu m'malo mwa ma gripper a pneumatic ndi ma gripper amagetsi, gripper yoyamba yamagetsi yokhala ndi makina ophatikizidwa a servo ku China.
● M'malo mwabwino kwambiri pa compressor ya mpweya + fyuluta + valavu ya solenoid + valavu yothamanga + chogwirira cha pneumatic
● Nthawi yogwira ntchito ya ma cycle angapo, mogwirizana ndi silinda yachikhalidwe yaku Japan



Chizindikiro Chofotokozera
| Nambala ya Chitsanzo Z-EFG-C50 | Magawo |
| Stroke yonse | 50mm yosinthika |
| Mphamvu yogwira | 40-140N yosinthika |
| Kubwerezabwereza | ± 0.03mm |
| Kulemera koyenera kogwira | ≤2kg |
| Njira yotumizira | Chigoba cha zida + chitsogozo chozungulira |
| Kudzaza mafuta pazinthu zosuntha | Miyezi isanu ndi umodzi iliyonse kapena mayendedwe / nthawi imodzi miliyoni |
| Nthawi yoyenda ndi sitiroko imodzi | 0.5s |
| Kachitidwe kosuntha | Zala ziwiri zimasuntha molunjika |
| Kulemera | 1kg |
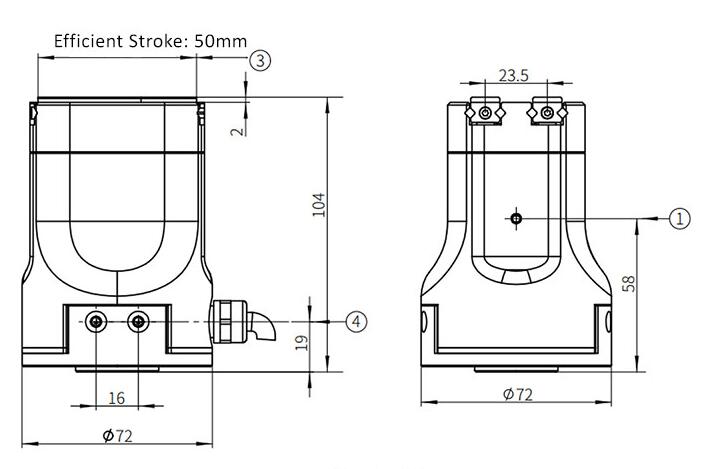
| Miyeso (L*W*H) | 72*72*143mm |
| Mphamvu yogwiritsira ntchito | 24V±10% |
| Yoyesedwa panopa | 0.8A |
| Mphamvu yapamtunda | 2A |
| Mphamvu | 20W |
| Gulu la chitetezo | IP20 |
| Mtundu wa injini | DC yopanda burashi |
| Kutentha kogwira ntchito | 5-55℃ |
| Kuchuluka kwa chinyezi chogwira ntchito | RH35-80 (Palibe chisanu) |

| Katundu wokhazikika wololedwa mbali yowongoka | |
| Fz: | 300N |
| Mphamvu yovomerezeka | |
| Mx: | 7 Nm |
| Zanga: | 7 Nm |
| Mz: | 7 Nm |
Kuyendetsa ndi Kuwongolera Kogwirizana
Chogwirira chamagetsi cha Z-EFG-C50 chili ndi makina olumikizirana a servo mkati, kukwapula konse ndi 50mm, mphamvu yokakamira ndi 40-140N, mphamvu yake yokakamira ndi yokakamira imatha kusinthidwa, ndipo kubwerezabwereza kwake ndi ±0.03mm.

Yogwirizana ndi Six-Axis Robot Arm

Chogwirira chamagetsi chingagwiritsidwe ntchito ndi mkono wa robot wa 6-axis, kuti chigwire ntchito yolumikizira ndi kusewera, nthawi yake yochepa kwambiri yolumikizira ndi masekondi 0.5 okha, zomwe zingakwaniritse zopempha zomangira za mzere wokhazikika wopanga.
Kukula Kochepa, Kosinthika Kuyika

Z-EFG-C50 ikugwiritsa ntchito njira yotumizira magiya olumikizirana ndi njanji yowongolera mpira, kukula kwa chinthucho ndi L72*W72*H143mm, ikhoza kusinthidwa kuti ikonzedwe bwino ngati ili ndi malo ochepa.


Kuchitapo Kanthu Mwachangu, Kulondola kwa Kulamulira Mphamvu

Nthawi yochepa kwambiri yogwiritsira ntchito single stroke ndi masekondi 0.5 okha, imatha kugwira ntchito yolimbitsa thupi mwachangu, ziwalo zake zam'mbuyo zimatha kusinthidwa nthawi iliyonse, makasitomala amatha kusintha michira malinga ndi zomwe akufuna.
Njira Zowongolera Zambiri, Zosavuta Kugwiritsa Ntchito

Kapangidwe ka Z-EFG-C50 ndi kosavuta, kali ndi njira zambiri zowongolera, kuphatikizapo 485 (Modbus RTU), Pulse, I/O, ndipo imagwirizana ndi makina owongolera a PLC.

Malo Okwezera Zinthu a Gravity Offset
1. Chizindikiro cha LED
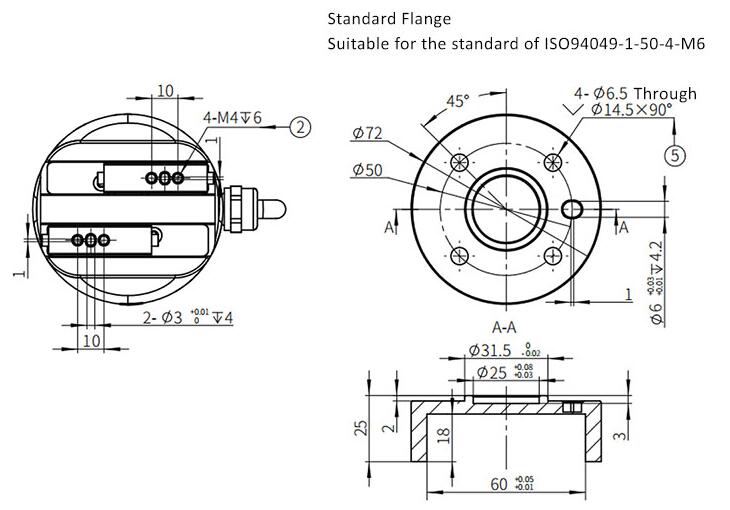
2. Malo Oyikira, gwiritsani ntchito zomangira za M4 4pcs
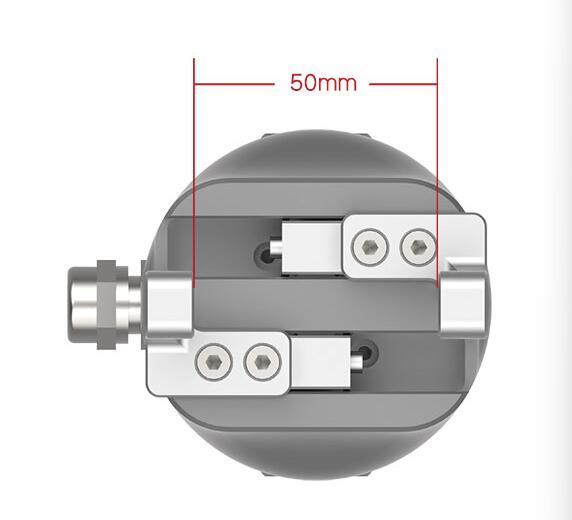
3. Kuthamanga kwa chogwirira chamagetsi ndi 50mm
4. Malo Ogulitsira Mtedza
5. Malo oyikapo, gwiritsani ntchito zomangira za M6 4pcs kuti mulumikizane ndi flange yomaliza ya mkono wa loboti wogwirizana
Bizinesi Yathu


Magulu a zinthu
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER CG SERIES – ...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGC SERIES –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-12 Paral...