Wowetsera Loboti Mkono ndi Kabati Yowongolera 6 Axis, Range 1300mm, Payload 20kg Industrial Robot
Wowetsera Loboti Mkono ndi Kabati Yowongolera 6 Axis, Range 1300mm, Payload 20kg Industrial Robot
Gulu Lalikulu
Dzanja la loboti la mafakitale / Dzanja la loboti logwirizana / Chogwirira chamagetsi / Woyendetsa wanzeru / Mayankho odziyimira pawokha
Kugwiritsa ntchito
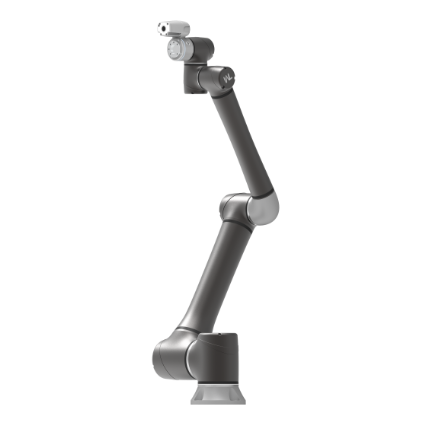
TM20 ili ndi mphamvu zambiri zonyamula katundu mu gulu lathu la ma robot a AI. Kuwonjezeka kwa katundu wolemera mpaka 20kg, kumapangitsa kuti ma robot automation ndi throughput ziwonjezeke mosavuta kuti zikhale zovuta komanso zolemera. Yapangidwira makamaka ntchito zazikulu zonyamula ndi kuyika, kusamalira makina olemera, komanso kulongedza ndi kuyika ma pallet ambiri. TM20 ndi yoyenera ntchito zosiyanasiyana m'mafakitale ambiri.
Ndi makina otsogola kwambiri a masomphenya, ukadaulo wapamwamba wa AI, chitetezo chokwanira, komanso kugwiritsa ntchito mosavuta, AI Cobot idzapititsa bizinesi yanu patsogolo kuposa kale lonse. Kwezani makina anu pamlingo wina powonjezera zokolola, kukonza bwino, komanso kuchepetsa ndalama.
Tikubweretsa mkono wathu wa roboti wa 6-axis watsopano komanso wogwira ntchito bwino, wopangidwa kuti usinthe njira zamafakitale monga kukweza ndi kutsitsa, kupukuta, kugwira ntchito, kupopera, kulowetsa zinthu mu inverter, ndi kudula malawi. Ndi ukadaulo wamakono komanso zida zapamwamba zodziyimira pawokha, mkono wa roboti uwu wosiyanasiyana umapereka kulondola kosayerekezeka komanso kupanga zinthu bwino.
Mphamvu yokweza ndi kutsitsa katundu ya mkono wathu wa roboti imapangitsa kuti ntchito yopangira zinthu ikhale yosavuta mwa kusamutsa zinthu ndi zinthu mwachangu komanso molondola pakati pa magawo osiyanasiyana opangira. Kaya ndikuyika zinthu pa lamba wonyamulira katundu kapena kutenga katundu womalizidwa kuchokera ku mzere wopangira, mkono wa roboti uwu umachita bwino kwambiri pakukonza zinthu ndi kuchepetsa ntchito zamanja.
Pankhani yopukuta, kuwongolera kolondola kwa mkono wathu wa robotic komanso mayendedwe ake mosamala kumatsimikizira kuti umakhala wopanda cholakwika pamalo osiyanasiyana. Mayendedwe ake okonzedwa bwino amatsanzira zovuta za kapangidwe ka manja a anthu molondola komanso mosasinthasintha, zomwe zimapangitsa kuti pakhale zinthu zapamwamba zomwe zimakwaniritsa miyezo yapamwamba kwambiri.
Kugwira zinthu zolemera komanso zolemera kumakhala kosavuta chifukwa cha luso la kunyamula la mkono wa robotic. Pokhala ndi masensa apamwamba komanso injini zamphamvu, imatha kuyendetsa mosavuta zinthu zamitundu yosiyanasiyana, kuchepetsa chiopsezo cha kuvulala ndikuwonjezera magwiridwe antchito m'malo opangira mafakitale.
Ntchito zopopera zimakhala zolondola komanso zogwirizana ndi chopopera cholumikizidwa chomwe chili pa mkono wa roboti. Kaya ndi kujambula mapangidwe ovuta pa nyumba zovuta kapena kuphimba malo akuluakulu mofanana, mkono wa roboti uwu umatsimikizira kuti umapangidwa mofanana komanso mwaukadaulo, kuchepetsa kuwononga ndalama komanso kugwiritsa ntchito bwino zinthu.
Kuwotcherera kwa inverter, njira yofunika kwambiri m'mafakitale ambiri, kumapangidwa kukhala kogwira mtima komanso kodalirika ndi dzanja lathu la robotic. Pokhala ndi luso lobwerezabwereza mapatani ovuta owotcherera, dzanja limapereka ma welds okhazikika komanso apamwamba, kuchepetsa zolakwika za anthu ndikuwonjezera zokolola.
Kuphatikiza apo, luso lodulira lawi la mkono wa roboti uwu limalola kudula zitsulo molondola komanso moyenera, kuchotsa kufunikira kwa ntchito zamanja ndikuwonjezera chitetezo m'malo oopsa.
Dzanja lathu la robotic lili ndi ukadaulo wapamwamba wa inverter komanso makina owongolera anzeru, kuonetsetsa kuti mphamvu zikuyenda bwino komanso mayendedwe ake ndi olondola. Izi zikutanthauza kuti timachepetsa ndalama zambiri komanso timapangitsa kuti ntchito zamafakitale ziwonjezeke.
Pomaliza, mkono wathu wa roboti wa 6-axis ndi wosintha kwambiri mu gawo la mafakitale, womwe umapereka maluso osiyanasiyana omwe amawongolera njira zosiyanasiyana. Ndi kulondola kosayerekezeka, kugwira ntchito bwino, komanso kusinthasintha, mkono wa roboti uwu umapatsa mabizinesi mphamvu zopeza zotsatira zabwino kwambiri, kusunga ndalama, ndikukhala patsogolo m'malo opanga zinthu omwe akusintha nthawi zonse.
Mawonekedwe
WANZERU
Cobot Yanu Yoteteza Mtsogolo ndi AI
• Kuyang'anira kuwala kodzichitira wekha (AOI)
• Chitsimikizo cha khalidwe ndi kusinthasintha
• Kuonjezera mphamvu zogwirira ntchito
• Kuchepetsa ndalama zogwirira ntchito
ZOSAVUTA
Palibe chidziwitso chofunikira
• Mawonekedwe ojambulira kuti mapulogalamu akhale osavuta
• Njira yosinthira yokhazikika pa ndondomeko
• Malangizo osavuta ophunzitsira maudindo
• Kuyang'anira mwachangu ndi bolodi lowongolera
ZOTETEZEKA
Chitetezo chogwirizana ndicho chinthu chofunika kwambiri kwa ife
• Ikutsatira ISO 10218-1:2011 & ISO/TS 15066:2016
• Kuzindikira ngozi ya Collison ndi kuyimitsa mwadzidzidzi
• Sungani ndalama ndi malo oti mugwiritse ntchito pokonza zotchinga ndi mpanda
• Khazikitsani malire a liwiro pamalo ogwirira ntchito ogwirizana
Ma cobot opangidwa ndi AI amazindikira kukhalapo ndi momwe zinthu zilili komanso momwe zimakhalira kuti azitha kuyang'anira zinthu ndi ntchito zosiyanasiyana. Amagwiritsa ntchito AI mosavuta pakupanga zinthu ndikuwonjezera zokolola, kuchepetsa ndalama, ndikufupikitsa nthawi yozungulira. Masomphenya a AI amathanso kuwerenga zotsatira za makina kapena zida zoyesera ndikupanga zisankho zoyenera moyenerera.
Kupatula kukonza njira zodzichitira zokha, gulu lochita kupanga zinthu pogwiritsa ntchito AI limatha kutsatira, kusanthula, ndikulumikiza deta panthawi yopanga kuti lipewe zolakwika ndikukweza mtundu wa malonda. Sinthani mosavuta makina anu opangira zinthu kuchokera ku fakitale pogwiritsa ntchito ukadaulo wathunthu wa AI.
Maloboti athu ogwirizana ali ndi njira yolumikizirana yowonera, zomwe zimapatsa ma cobot mphamvu yozindikira malo ozungulira zomwe zimawonjezera kwambiri luso la ma cobot. Kuwona kwa ma robot kapena luso "lowona" ndikutanthauzira deta yowoneka ngati malangizo ndi chimodzi mwazinthu zomwe zimatipangitsa kukhala apamwamba. Ndi njira yosinthira masewera pochita ntchito molondola m'malo ogwirira ntchito osinthika, kupangitsa kuti ntchito ziziyenda bwino, komanso njira zodzichitira zokha zigwire bwino ntchito.
Popangidwa poganizira ogwiritsa ntchito koyamba, chidziwitso cha mapulogalamu sichinthu chofunikira kuti muyambe kugwiritsa ntchito AI Cobot. Kuyenda kosavuta pogwiritsa ntchito pulogalamu yathu yoyendetsera mapulogalamu kumachepetsa zovuta. Ukadaulo wathu wovomerezeka umalola ogwiritsa ntchito omwe alibe chidziwitso cholemba ma code kukonza pulojekiti ya mphindi zisanu zokha.
Masensa oteteza omwe ali mkati mwake amaletsa AI Cobot pamene kukhudzana ndi thupi kwapezeka, zomwe zimachepetsa kuwonongeka komwe kungachitike chifukwa cha malo opanda kupanikizika komanso otetezeka. Muthanso kukhazikitsa malire a liwiro la loboti kuti igwiritsidwe ntchito m'malo osiyanasiyana pafupi ndi antchito anu.
Zogulitsa Zofanana



Chizindikiro Chofotokozera
| Chitsanzo | TM20 | |
| Kulemera | 32.8KG | |
| Malipiro Ochuluka | 20KG | |
| Fikirani | 1300mm | |
| Magawo Olumikizana | J1,J6 | ±270° |
| J2,J4,J5 | ±180° | |
| J3 | ±166° | |
| Liwiro | J1,J2 | 90°/s |
| J3 | 120°/s | |
| J4 | 150°/s | |
| J5 | 180°/s | |
| J6 | 225°/s | |
| Liwiro Lachizolowezi | 1.1m/s | |
| Liwiro Lalikulu | 4m/s | |
| Kubwerezabwereza | ± 0.1mm | |
| Mlingo wa ufulu | Magawo 6 ozungulira | |
| Ine/O | Bokosi lowongolera | Kulowetsa kwa digito: 16 Zotsatira za digito: 16 Kulowetsa kwa analogi:2 Zotsatira za analogi: 1 |
| Chida Cholumikizira. | Kulowetsa kwa digito: 4 Kutulutsa kwa digito: 4 Kulowetsa kwa analogi: 1 Zotsatira za analogi:0 | |
| Mphamvu Yopereka Mphamvu ya I/O | 24V 2.0A ya bokosi lowongolera ndi 24V 1.5A ya chida | |
| Kugawa kwa IP | IP54 (Robot Arm); IP32 (Bokosi Lolamulira) | |
| Kugwiritsa Ntchito Mphamvu | Ma watts 300 wamba | |
| Kutentha | Roboti imatha kugwira ntchito kutentha kwa 0-50℃ | |
| Ukhondo | Kalasi 3 ya ISO | |
| Magetsi | 100-240 VAC, 50-60 Hz | |
| Chiyankhulo cha I/O | 3xCOM, 1xHDMI, 3xLAN, 4xUSB2.0, 2xUSB3.0 | |
| Kulankhulana | RS232, Ethemet, Modbus TCP/RTU (mbuye ndi kapolo), PROFINET (Zosankha), EtherNet/IP (Zosankha) | |
| Malo Opangira Mapulogalamu | TMflow, tchati cha mayendedwe | |
| Chitsimikizo | CE, SEMI S2 (Njira) | |
| Luso la AI ndi Masomphenya*(1) | ||
| Ntchito ya AI | Kugawa, Kuzindikira Zinthu, Kugawa, Kuzindikira Zosamveka, AI OCR | |
| Kugwiritsa ntchito | Kuyika Malo, Kuwerenga Barcode ya 1D/2D, OCR, Kuzindikira Zilema, Kuyeza, Kuyang'ana Msonkhano | |
| Kulondola kwa Malo | Malo a 2D: 0.1mm*(2) | |
| Diso m'dzanja (Lomangidwa mkati) | Carmera yojambula yokha yokhala ndi mawonekedwe a 5M, Kutalika kwa ntchito 100mm ~ ∞ | |
| Kuyang'ana Diso ndi Dzanja (Ngati mukufuna) | Thandizani makamera apamwamba kwambiri a 2xGigE 2D kapena 1xGigE 2D Camera +1x3D Camera*(3) | |
| *(1)Palibe manja a loboti owoneka mkati omwe ali ndi TM12X, TM14X, TM16X, TM20X omwe alipo. *(2)Deta yomwe ili mu tebulo ili imayesedwa ndi labotale ya TM ndipo mtunda wogwirira ntchito ndi 100mm. Tiyenera kudziwa kuti muzogwiritsidwa ntchito, mitengo yoyenera ikhoza kukhala yosiyana chifukwa cha zinthu monga gwero la kuwala komwe kuli pamalopo, mawonekedwe a chinthu, ndi njira zowonetsera masomphenya zomwe zingakhudze kusintha kwa kulondola. *(3)Onani tsamba lovomerezeka la TM Plug & Play kuti mudziwe makamera omwe amagwirizana ndi TM Robot. | ||
Bizinesi Yathu


Magulu a zinthu
-

Roboti Yoyendetsa Magalimoto Yothamanga Kwambiri 700-800t ...
-

Ma Axis 6 Apamwamba Kwambiri Opangira Zinthu Zosakira ndi Kukonza ...
-

Luntha 6 Axis Manipulator Arm Industrial ...
-

Good Quality China Suppliers Cheap Collaborativ ...
-

Robot Yogwirizana ndi Makampani ya Cobot Yokwezera,...
-
5kg 6kg 6 Axis Industrial Robotic Arm ya Weldi ...