SCARA ROBOTIC ARMS – Z-Arm-4150 Robotic Arm Yogwirizana





Gulu Lalikulu
Dzanja la loboti la mafakitale / Dzanja la loboti logwirizana / Chogwirira chamagetsi / Woyendetsa wanzeru / Mayankho odziyimira pawokha
Kugwiritsa ntchito
Ma SCIC Z-Arm cobots ndi ma robot opepuka ogwirizana a 4-axis okhala ndi drive motor yomangidwa mkati, ndipo safunanso zochepetsera monga scara zina zachikhalidwe, zomwe zimachepetsa mtengo ndi 40%. Ma SCIC Z-Arm cobots amatha kugwira ntchito kuphatikiza koma osati kokha kusindikiza kwa 3D, kusamalira zinthu, kuwotcherera, ndi kujambula kwa laser. Imatha kusintha kwambiri magwiridwe antchito ndi kusinthasintha kwa ntchito yanu ndi kupanga.
Mawonekedwe

Kulondola Kwambiri
Kubwerezabwereza
± 0.05mm
Katundu Wamkulu
Chidebe cha 4kg
5kg yokwanira
Liwiro Lalikulu
Liwiro lalikulu kwambiri la mzere 1.4m/s
(Kulemera kwa 4kg)
Mtengo Wopikisana
Ubwino wa mafakitale
Cmtengo wopikisana
Yosavuta Kukonza, Yosavuta Kuyika, Yosinthasintha ya 4-Axis Robot Arm
Katundu Waukulu
Katundu Wokhazikika: 4kgKulemera Kwambiri: 5kg
Kulondola Kwambiri
Kubwerezabwereza: ± 0.05mm
Z-Axis Yopangidwira Makonda
Kuthamanga kwa mmwamba ndi pansi kumatha kusinthidwa pakati pa 10mm ndi 1000mm
Liwilo lalikulu
Liwiro lake lolunjika ndi mpaka 1400mm/s pansi pa katundu wa 4kg
Zosavuta Kugwiritsa Ntchito
Ndi yosavuta kugwiritsa ntchito ngakhale kwa amene sankadziwa loboti kale
Dalaivala Yogwirizana ndi Wowongolera
Palibe dera lowonjezera, losavuta kuyika ndi kusonkhanitsa

Zogulitsa Zofanana



Chizindikiro Chofotokozera
SCIC Z-Arm 4150 idapangidwa ndi SCIC Tech, ndi loboti yopepuka yogwirizana, yosavuta kupanga ndikugwiritsa ntchito, imathandizira SDK. Kuphatikiza apo, imathandizidwa ndi kuzindikira kugundana, ndiko kuti, ingakhale yoyimitsa yokha mukakhudza munthu, komwe ndi mgwirizano wanzeru pakati pa anthu ndi makina, chitetezo chili chokwera.
| Dzanja la Robot Logwirizana la Z-Arm 4150 | Magawo |
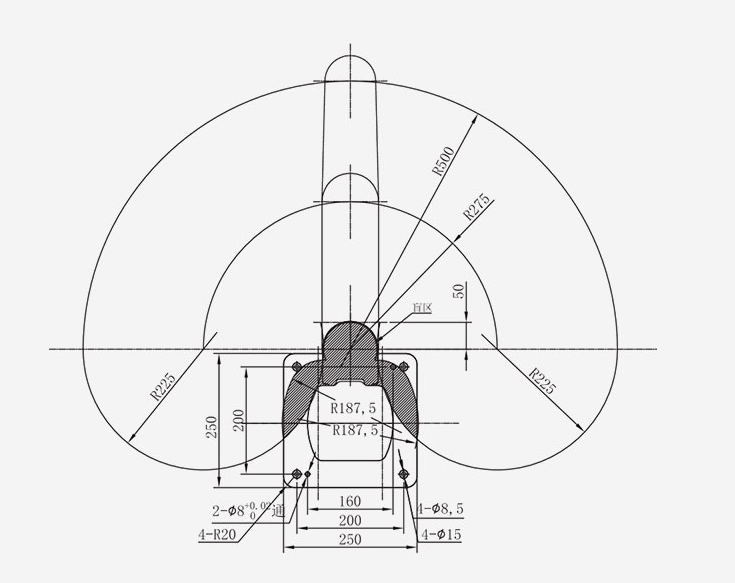
| Utali wa mkono umodzi wozungulira | 275mm |
| Ngodya yozungulira yozungulira imodzi | ±90° |
| Utali wa mkono wa axis ziwiri | 225mm |
| Ngodya yozungulira yozungulira 2 | ±164° Zosankha: 15-345deg |
| Kukwapula kwa Z axis | Kutalika kwa 410 kungasinthidwe |
| Mtundu wozungulira wa R axis | ±1080° |
| Liwiro la mzere | 1400mm/s (muyezo wolemera 4kg) |
| Kubwerezabwereza | ± 0.05mm |
| Malipiro wamba | 4kg |
| Malipiro ambiri | 5kg |
| Mlingo wa ufulu | 4 |
| Magetsi | 220V/110V50-60HZ imagwirizana ndi mphamvu yayikulu ya 48VDC 960W |
| Kulankhulana | Ethaneti |
| Kufalikira | Wowongolera woyenda wolumikizidwa mkati mwake amapereka kukulitsa kwa 24 I/O + pansi pa mkono |
| Z-axis ikhoza kusinthidwa kutalika kwake | 0.1m~1m |
| Kuphunzitsa kukoka kwa Z-axis | / |
| Malo olumikizira magetsi osungidwa | Kapangidwe kabwino: mawaya 24*23awg (osatetezedwa) ochokera pa soketi kudzera pachivundikiro cha mkono chapansi Zosankha: machubu awiri a vacuum 2 φ4 kudzera mu socket panel ndi flange |
| Zogwirizira zamagetsi za HITBOT zogwirizana | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100/5thAxis, kusindikiza kwa 3D |
| Kuwala kopumira | / |
| Kusuntha kwa mkono wachiwiri | Muyezo: ±164° Zosankha: 15-345deg |
| Zowonjezera zomwe mungasankhe | / |
| Gwiritsani ntchito malo ozungulira | Kutentha kozungulira: 0-45°C Chinyezi: 20-80%RH (palibe chisanu) |
| Kulowetsa kwa digito kwa I/O port (yokha) | 9+3+kuwonjezera mkono pamphumi (ngati mukufuna) |
| Kutulutsa kwa digito kwa I/O port (yokha) | 9+3+kuwonjezera mkono pamphumi (ngati mukufuna) |
| Kulowetsa kwa analogi ya I/O port (4-20mA) | / |
| Kutulutsa kwa analogi ya doko la I/O (4-20mA) | / |
| Kutalika kwa mkono wa loboti | 830mm |
| Kulemera kwa mkono wa loboti | Kulemera konse kwa 410mm stroke 28kg |
| Kukula kwa maziko | 250mm*250mm*15mm |
| Mtunda pakati pa mabowo okonzera maziko | 200mm*200mm yokhala ndi zomangira zinayi za M8*20 |
| Kuzindikira kugundana | √ |
| Kuphunzitsa koka | √ |
Katundu Waukulu: 5kg, Kusankha Kwabwino Kwambiri Pantchito Yopangira
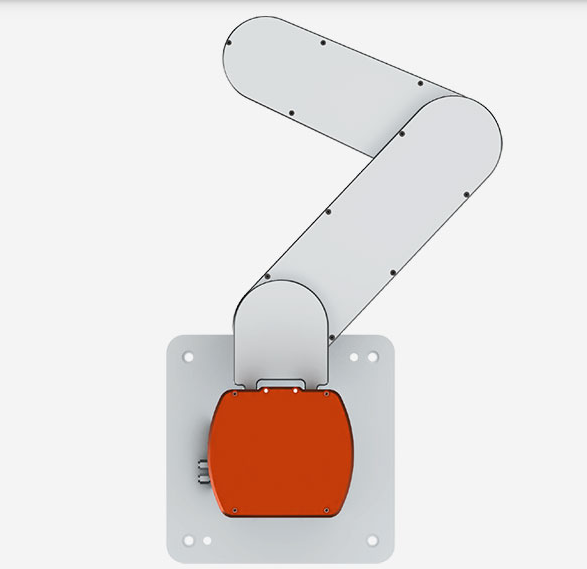
Z-Arm XX50 ndi mkono wa loboti wosinthasintha wa 4-axis, katundu wake wokwera kwambiri ukhoza kufika pa 5kg, umatenga malo ochepa, woyenera kwambiri kuyikidwa pamalo ogwirira ntchito kapena mkati mwa makina, ndi chisankho chabwino kwambiri cha mizere yopangira yodzipangira yokha.

Wopepuka, Ngodya Yaikulu Yozungulira

Kulemera kwa chinthucho ndi pafupifupi 28kg, kutalika kwa mkono wake ndi mpaka 275mm, ngodya yozungulira ya 1-axis ndi ±90°, ngodya yozungulira ya 2-axis ndi ±164°, ndipo R-axis imatha kuzunguliridwa ndi ±1080°.
Kutalika Kwake Kungathe Kusinthidwa Mosavuta
Choyendetsa ndi chowongolera chophatikizidwa, palibe dera lowonjezera, chosavuta kuyika ndikuphatikiza, kutalika kwa Z-axis kumatha kusinthidwa pakati pa 10mm-1000mm, kumatha kuzungulira kwamkati kuti kupewe kutsekeka.

Yosinthasintha Kugwiritsa Ntchito, Yosinthasintha Mwachangu
Z-Arm XX50 ndi dzanja la robot logwirizana kwambiri, lili ndi makhalidwe osungira malo komanso osinthasintha kuti ligwiritsidwe ntchito, ndi loyenera kugwiritsidwa ntchito m'mapulogalamu ambiri, palibe kusintha kapangidwe kake kokhazikika, kuphatikiza kusintha mwachangu komanso kupanga pang'ono, ndi zina zotero.
Mgwirizano Wabwino ndi Chitetezo
Dzanja la Robot likhoza kugwira ntchito limodzi ndi anthu popanda chitetezo chowonjezera, m'malo mwa kugwira ntchito zomwe ndi zodetsa, zoopsa komanso zosasangalatsa, kupewa ndikuchepetsa kuvulala kobwerezabwereza komanso kuvulala mwangozi.

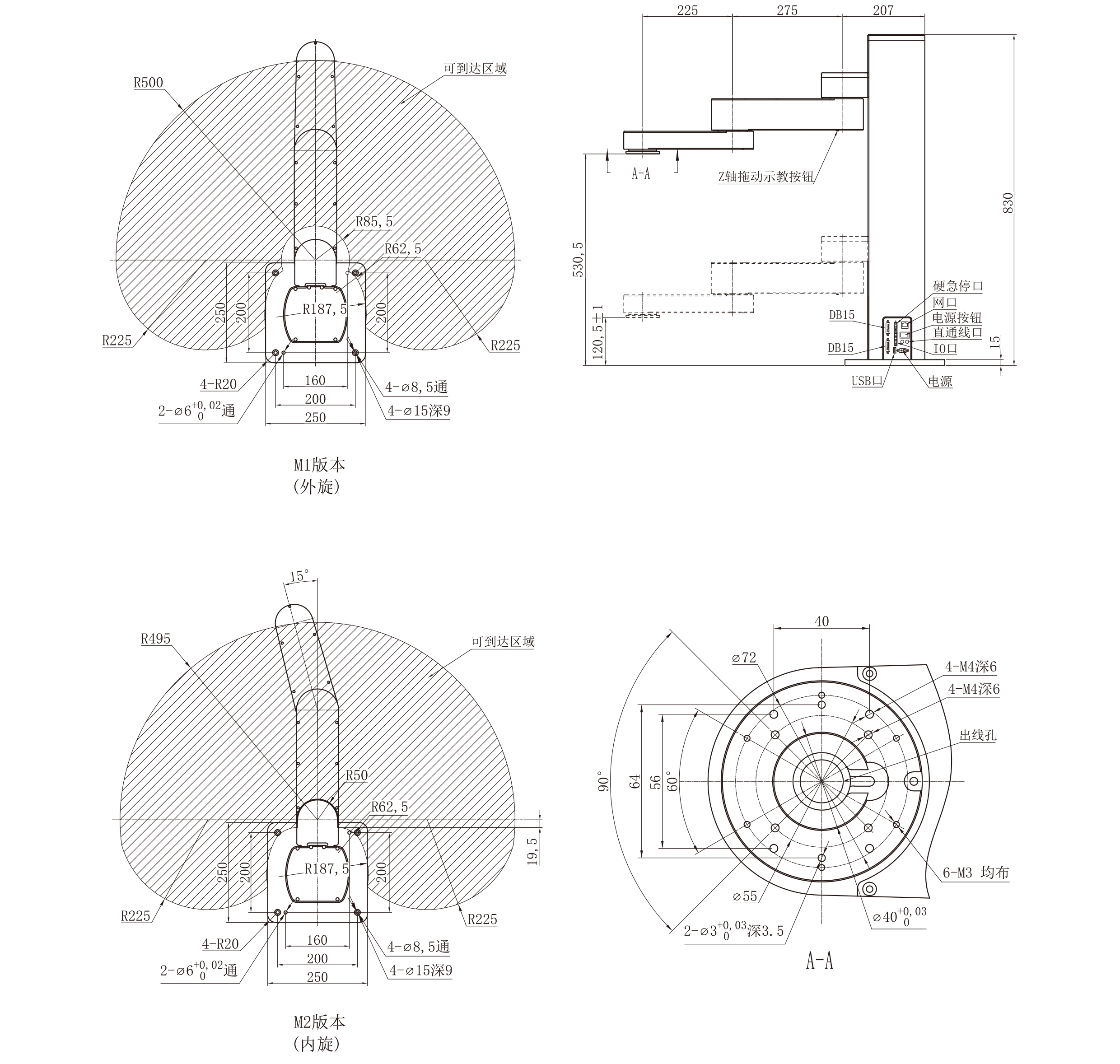
Mtundu wa Mayendedwe a M1 (Tsegulani Kunja)
Malangizo a DB15 Connector

Chitsanzo Chovomerezeka: Yamphongo yokutidwa ndi golide yokhala ndi chipolopolo cha ABS YL-SCD-15M Yaikazi yokutidwa ndi golide yokhala ndi chipolopolo cha ABS YL-SCD-15F
Kufotokozera Kukula: 55mm*43mm*16mm
(Onani Chithunzi 5)
Chithunzi cha Malo Ogwiritsira Ntchito Kunja kwa Robot Arm

Bizinesi Yathu






